



Pusherのリアルタイム通信機能「Channels」を試してみる
nantacon
Azarashi Tech

リモートデバイスやロボットをWebブラウザから遠隔操作したいと思った際に使える、リアルタイム通信のプロトコルやソフトウェアフレームワークを紹介する。
ちょっとしたIoT機器をスマートスピーカーから操作するなんていうことは、今時すぐにできることが多い。Google HomeとSwitchbotデバイスを繋いだらいろんな事ができる。
ただシステム間で双方向通信を行い、リアルタイムに任意のデバイスを思い通りに動かしたいとなると、まだそこまでよくパッケージ化された仕組みはない。何かしらのソフトウェアフレームワークを活用し、開発行為を挟む必要がある。本記事は、その開発に必要な知識を提供する。
GPT4で候補を聞いてみると、下記のとおりである。
列挙してみるのをみると、WebSocketが一番安泰のように見える。TCPベースなので、UDPベースのWebRTCなどと比べて遅いが、操作信号のような低容量でありつつ信頼性が求められる信号というと、やはりWebSocketに落ち着く。
映像データをリアルタイム伝送するとなるとWebRTCは外せない。ただこれはUDPベースなので、信頼性が心配である。映像などの非構造データを送るのはいいが、ミッションクリティカルな情報を送るときに心配だ。
MQTTはデータ伝送量を絞るのには良いが、リアルタイム性が落ちる。
TCP/IPやシリアル通信は、ややネイティブすぎて、このまま本格的なシステムに実用するコストが高すぎる。
一方で、WebSocketというと非常に前からあるイメージ。調べてみると、WebSocketは2009〜2010年くらいには存在している模様。
代替のプロトコルはないか?と調べてみるとWebTransportというものがあった。
WebTransportはGoogle製のQUICをコア技術にしており、UDPベースでありながら高速で信頼性の高い双方向通信可能なプロトコルらしい(とはいえ、利用しているソフトウェアフレームワークもあるようなので、この辺りの正確な状況はよくわからない)。
2022年にやっとリリースされたばかりの新しい技術のようで、まだ標準化プロセスの最中。日本語の関連記事は少ない。
上のリンク先のページの比較表を日本語訳してみると下記の通り。WebTransportの方が将来的に良い部分が多い。標準化が進み、普及して実用例が増えていけば、デファクトスタンダードはいずれWebSocketからWebTransportに置き換わっていくのだろうと思う。ただしばらくはWebSocketが主流だろう。
| 特徴 | WEBTRANSPORT | WEBSOCKETS |
|---|---|---|
| プロトコル | QUICを利用 | Websocketを利用 |
| マルチクレキシング | ビルトインのマルチプレキシング | マルチプレキシングをサポート |
| 信頼性 | ビルトインのエラー修正による信頼性提供 | アプリケーションレベルでのエラー対応が必要 |
| セキュリティ | デフォルトでTLSを用いた暗号化 | WSSによる暗号化を要求 |
| 柔軟性 | 低レベルでの通信のために設計されている | 高レベルでのメッセージプロトコル |
| ストリーム サポート | 並列データに対するマルチストリーム対応 | シングルの双方向通信チャンネル |
| バイナリデータのサポート | バイナリデータ送信の効率的なサポート | バイナリとテキストのデータ送信をサポート |
| フロー制御 | より良いリソース活用のためのビルトインフロー制御 | フロー制御はマニュアルでの実装が必要 |
| ブラウザの サポート | メジャーなブラウザに 限定したサポート | 様々なモダンブラウザに対する幅広いサポート |
| ユースケース | 低遅延かつリアルタイムな アプリケーション、ゲーム開発 | リアルタイム通信、メッセージアプリ |
| 通信レイヤ | UDPの上に作られている パフォーマンス重視 | TCPの上に作られている 信頼性重視で潜在的により高い遅延 |
| コネクションの セットアップ | 高速なセットアップ | WebTransportと比較するとやや遅い |
| 標準化 | 未だIETFによる標準化の最中 | IETFによる標準化済 |
WebSocketを使うのが良いことはわかったが、WebSocketを使う良いソフトウェアフレームワークがないかを調査してみた。結果的に、下記候補が得られたので紹介していく。
ちなみにSignalRという選択肢もあるかもしれないが、ちょっとMicrosoftに縛られすぎた選択肢であり自分があまり詳しくないので除外します。(ごめんなさい)
ROSはロボティクス研究者/技術者で知らない者はいない、定番のロボットシステムを構築するためのフレームワークである。
ROS 1とROS 2が存在しており、最近ではROS 2への移行が進んでいる。
ROS 1にはWebSocketによりWebブラウザとロボットシステムを繋ぐ仕組みが存在している。
より正確には、仕組みが存在しているというより、ROS を使ってWebブラウザとロボットシステムをWebSocketによる通信できるようにする機能が公開されている。Robot WebToolsというプロジェクトで推進されている。
ROS 2では、DDS(Data Distribution Service)というものを通信プロトコルで採用しているので、これで遠隔制御もできる。ちなみにこれはWebSocketではない。
ROS 2(Robot Operating System 2)では、通信バックボーンとしてDDS(Data Distribution Service)を採用しています。DDSはリアルタイムシステム用のミドルウェア規格で、高度なデータ通信サービスを提供することを目的としています。この技術は特に、分散システム間でのデータの効率的な配信が求められる場合に利用されます。
GPT4
ROS 1であっても、ROS 2であっても、操作側とデバイス側がネットワーク的に通信できる環境を整えられている環境の構築が必要である。2つのクライアントが単にインターネットに接続されているだけでなく、2つの接続関係をきちんと制御してやる必要がある。
オンラインゲームのように、ホストとクライアントがコロコロと変わる可能性がある場合は一筋縄ではいかないので、別の仕組みをきちんと用意してあげる必要がある。これは言葉で書くと簡単に聞こえるが、実際に実現しようとするとかなりの実装コストがかかる。
研究段階やデモシステムなどで、通信するシステムの関係性が固定で、短期的な利用であれば、そういった制約は無視できるため、ROSの活用はお勧めできる。プロダクションレベルでの利用は追加の実装コストが必要と予想する。
特にどうしてもプロダクションレベルで使いたいのであれば、最低限ROS 1ではなくROS 2の活用をおすすめする。ROS 1は今は使い勝手が良いが、将来はROS 2へと移行していくし、プロダクションに使うには信頼性が足りないなどの多くの問題がある。長くなるのでここは割愛。
Socket.ioはNode.js ベースのサーバーとクライアントの間のリアルタイム通信を提供するライブラリ。サイトのキャッチフレーズには「あらゆるプラットフォームに対応した低遅延の双方向通信」と謳われている。
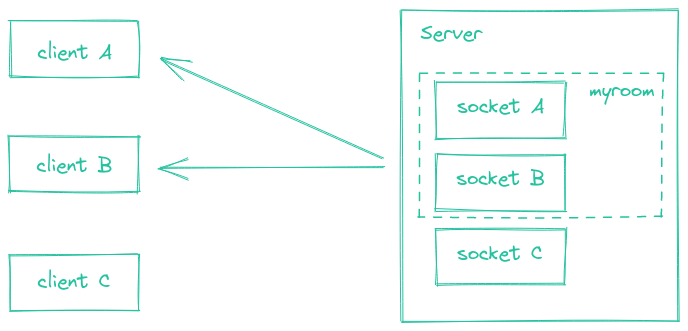
Socket.ioでは、クライアントたちがサーバにある「ルーム」という概念にアクセスして、通信できるようにする。ブロードキャストもできる様子。ただのWebSocketではなく、サーバーを介したマルチユーザ間の柔軟な通信ができる仕組みのようだ。
実際にこれでマルチプレイのオンラインゲームを作ってみている人もいる。
ドキュメントをみると、通信レイヤでWebTransportも選べると書いてあるので、すでにWebTransportが使われている例でもあるようだ。
歴史もそれなりにあり、WebSocketが標準化された2010年ごろから存在しているらしい。
Pusherはリアルタイム機能をクラウドベースで提供するサービスで、WebSocketと同様のAPIを通じてリアルタイム通信を提供する。APIを通じてリアルタイムメッセージングや通知、ブロードキャストが可能で、開発者はサーバーの管理やスケーリングを心配する必要がない。
フレームワークというより、SaaSでSocket.ioライクなことができるもののようだ(素晴らしい!)。
Github, DataDog, The Washington Postといった有名どころで使われている。
ロボットの遠隔操作で使うケースというのは見受けられなかったが、マルチゲームプレイに適している話が同社ブログに書かれていたので、原理的には使えるはず。https://pusher.com/blog/websockets-realtime-gaming-low-latency/
接続状況のモニタリングをDatadogを介して行うこともできる様子(Proプラン以上)。
無料プランもあり、お試しできそう。
さらに、幅広いプログラミング言語をサポートしている。(Python, Java, Ruby, PHP, Go, JavaScript, Unity, and React Native)
東京オリンピックで一部使われたとかの話もあり。
https://pusher.com/blog/tokyo-olympics-realtime-lighting-app
同社ブログは2019年ごろから更新されているのをみる限り、非常に若い会社なのだろうと思う。(いつかどこかに買収されるのかな?)
何にせよ、SaaSでSocket.ioサーバを立てたくない面倒くさがり屋にはとても良いものだと思われる。サーバメンテをするコストも結構かかるので、コスト面でも実はベストかもしれない。
補足だが、ゲームエンジンを使う方法も考えられると思う。
Unreal EngineやUnityといったゲームエンジンではマルチプレイヤーのゲームをサポートするための仕組みが内包されているケースがある。AWSだとGameLiftとかのサービスで、マルチプレイヤーサポートをしていたりする。
ゲームエンジンという切り口で調査するとさらに広がりを見せるが、実現する手段とスケールが変わってきて発散するので、今回は範囲外としました。
次回、Sockt.ioやPusherについて実際に動かしてみたレポートを載せてみれたらと思います。